
Kedysi roboty mohli fungovať prakticky bez snímačov prostredia, pretože vykonávali monotónnu funkciu kdesi za bezpečnostnou ohradou. Odkedy začali slúžiť pri montáži, potrebovali mať prehľad, akú silu používajú, potrebovali aj vidieť, skrátka, potrebovali aj nejaké zmysly. Vy pracujete na tom, aby si roboty uvedomovali svoje vlastné telo. Je náročné ich to naučiť?
Určite áno, venoval som sa tejto téme už na Univerzite v Zürichu, kde som pôsobil u doktora Rolfa Pfeifera, ktorého hlavná misia bol tzv. embodiment, teda vtelenie. Snaha, aby robot čo najlepšie ovládal svoje telo. Viete, keď sa o robotoch hovorilo niekedy pred päťdesiatimi či šesťdesiatimi rokmi, veľa pozornosti sa venovalo mozgu počítača. Diskutovalo sa o tom, ako mu naprogramovať myšlienky, ako ho napríklad naučiť hrať šach. Telo robotov bolo druhoradé alebo akoby sa s ním ani vôbec nepočítalo. Neskôr sa roboty skutočne naučili hrať šach aj lepšie ako človek, ale aj dnes je pre ne problém zvládať niektoré pre človeka úplne triviálne veci. Ako napríklad podať niekomu hrnček s kávou. Ukazuje sa, že komunikácia so skutočným svetom pomocou tela, motorov, senzorov môže byť minimálne rovnako komplikovaná ako čisto algoritmické problémy.
Môže byť odpoveďou práve umelá koža, ktorú vyvinuli vaši kolegovia v inštitúte v Janove?
Prispieva k tomu. Ale keď chcete mať humanoidného robota, ktorý má motorické schopnosti čo najviac podobné ľuďom, potrebujete čo najpestrejšie spektrum senzorov, ktoré nahradia to, čo my vnímame zmyslami. V robotike sa klasicky dáva dôraz na kamery, ale to je len jeden z možných zmyslov robota, nie je presný a zďaleka nestačí na všetko. Ja keď zavriem oči, tak viem, kde mám ruky, môžem si to overiť napríklad aj hmatom, dotykom seba samého či prostredia okolo. Toto všetko mi dáva celistvosť vnímania a spoľahlivosť informácií. Ak by sme sa u robotov naďalej spoliehali len na jednorozmerné vnímanie zrakom, teda kamerami, bola by to chyba.
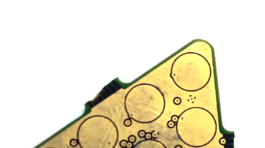 Foto: Archív Matěja Hoffmanna
Foto: Archív Matěja Hoffmanna
Aké ďalšie zmysly môžeme robotom nasimulovať?
Roboty môžu mať aj senzory, ktoré u človeka nenájdeme, ako rôzne laserové či infračervené . Vysielajú do prostredia neviditeľný lúč, ktorý sa odrazí, vráti späť a robot z toho vyhodnotí situáciu. Všeobecne sa veľký dôraz kladie na tie senzory, ktoré zachytia priestor v troch dimenziách. Aby ste si to vedeli lepšie predstaviť, môžem spomenúť napríklad Kinect od Microsoftu, ktorý mnoho ľudí využíva pri hraní hier na konzole. Je to lacný a dobre dostupný senzor, ktorý v interiéri a na určitú vzdialenosť relatívne dobre funguje. Vonku je to už horšie. Vytvorí vlastne mapu priestoru, ktorá môže slúžiť na ovládanie hry, ale pri inom použití napríklad aj pre roboty, ktoré vďaka tomu "vidia” prekážky v miestnosti. Naše zmysly sú však stále oveľa presnejšie a spoľahlivejšie, takže pri porovnaní vnímania prostredia súboj človek verzus stroj vyznieva takmer vo všetkom v náš prospech.
Nespomenuli ste zatiaľ robotickú kožu. Čo si pod ňou možno predstaviť?
U nášho humanoidného robota iCub sú to vlastne malé, čiastočne ohybné trojuholníky, na prvý pohľad pripomínajúce počítačový čip. Každý trojuholník obsahuje desať bodov, dotykových senzorov, sú to takzvané taxely. Funguje to podobne ako pri dotykových mobilných telefónoch. No a my konkrétne týmito trojuholníkmi pokrývame celé robotické dieťa iCub, s ktorým pracujeme.
Robotické dieťa?
Áno, ide o veľký medzinárodný projekt, ktorý vznikol pred desiatimi rokmi. iCub je humanoidný robot, ktorý má formu a veľkosť asi štvorročného dieťaťa. V očných jamkách má dve kamery, ktoré sa snažia kopírovať prirodzený pohyb očí u človeka. Vlastne celý robot je vyvíjaný pre projekty "vtelenia”. Vlastnia ho mnohé pracoviská a univerzity a je open-source, čo je skvelé, pretože akýkoľvek objav môže voľne využívať ktokoľvek ďalší, kto robota vlastní. Problém s inými robotmi predtým bol ten, že moduly, ktoré ste roky vyvíjali, mohli fungovať len v tom vašom konkrétnom robote. Pri iCub je to vzájomné kompatibilné, takže keď teraz napríklad kolegovia v Anglicku zverejnia modul rozpoznávania okolia, môžem ho hneď prebrať a využívať aj ja. iCub je špecifický tým, že je to prvý robot kompletne pokrytý kožou.
V čom je výhoda, že sú senzory po celom tele?
Dotykové senzory sa využívali aj predtým, ale obvykle len na koncovom článku. Je to jednak obmedzujúce, ale najmä nebezpečné. Robot môže tými ostatnými časťami tela, kde nemá dotykové senzory, niekoho zraniť bez toho, že by o tom vedel. Keď má kožu po celom tele, dá sa už povedať, že si uvedomuje vlastné telo, lepšie a bezpečnejšie s ním pracuje. Je tak aj človeku podobnejší.
Je to inak správna cesta? Aby boli roboty ľuďom podobné – teda humanoidné?
Svet, v ktorom žijeme, je prispôsobený pre ľudí. Takže ak budú roboty kopírovať našu stavbu tela a vnímanie sveta, nebude potrebné im svet prispôsobovať. Okrem toho, komunikovať s niekým, kto má ľudskú formu, je pre nás aj prirodzenejšie.
 Foto: IIT
Foto: IIT
Máte už aj nejaké praktické príklady použitia pre robotickú kožu?
Jedno z využití môže byť pri kalibrácií robotov, čo je dnes veľká téma. Robot prichádza do továrne presne nakalibrovaný, keď robí nejaký mechanický úkon, musí to byť na milimetre presné. Časom sa však vplyvom rôznych okolností, povedzme, že sa opotrebuje, či sa mu posunie nejaký kĺb, môžu vytvoriť odchýlky, a tak treba robota prekalibrovať. Vtedy musí prísť niekto od výrobcu a napríklad za pomoci laseru robota dokalibrovať, no a tento servis stojí veľa peňazí. Preto je veľký záujem, aby to roboty vedeli zvládať samy.
Ako k tomu pomôže robotická koža?
Pri kalibrácii môže robot využívať vlastné senzory na overovanie jednej a tej istej informácie. Zrak, teda kamery mu indikujú, že ruka sa nachádza v istej pozícii. Má v sebe nakódovaný vlastný matematický model, takže si môže dodatočne číselne zmerať, či je ruka naozaj v danej pozícii. K väčšej istote potrebujeme však ešte jednu informáciu, a tú môže ponúknuť práve koža. Dotykom vlastného tela overí, či výpočty boli správne. Matematický model mu môže hovoriť, že k dotyku príde až o pár centimetrov, ale keď dotyk cíti, vie, že niekde bude chyba.
Je to teda revolučný krok k tomu, aby roboty mohli bezpečne opustiť kontrolované priestory tovární?
Neviem, či by som to nazval revolúciou, ale určite je to jeden z krokov, ktorý k tomu povedie. Je to dôležitá technológia pre komunikáciu, ale aj pre bezpečnosť.
Keď sa v súčasnosti hovorí o nebezpečí v súvislosti s robotmi, ľudia sa viac boja toho, že nás nahradia a pripravia o prácu. Je otázka fyzickej bezpečnosti ľudí pri kontakte s robotmi skôr témou odborníkov ako verejnosti?
Neviem úplne posúdiť, čoho sa obáva verejnosť, ale v odborných kruhoch je to téma, ktorej sa ľudia venujú dlhodobo. Na prácu s robotmi sú rôzne ISO bezpečnostné štandardy a aj priemyselné roboty sa dizajnujú tak, aby ľudí ohrozovali čo najmenej. Robotické ruky by mali byť čo najľahšie, nemali by sa príliš rýchlo hýbať, pri nejakom neštandardnom dotyku by sa mali okamžite zastaviť. V živote však vznikajú rôzne neprehľadné situácie, keď nevedia vyhodnotiť, čo sa deje, keďže na to nemajú senzor.
Na prednáške v Bratislave ste ukazovali príklad takejto situácie – keď mal robot vyťahovať predmet z klobúka spolu s človekom, pričom mal dbať na to, aby sa nedotýkal ľudskej ruky…
Áno, to je presne ten príklad, keď tradičné senzory nestačia. Koža v tomto prípade pomáha, lebo podľa pohybu iných predmetov vieme dokonca naučiť predvídať robota, že príde k dotyku, ešte predtým, ako k nemu skutočne dôjde. V ukážkovom videu ste mohli vidieť, že keď som sa k nemu priblížil rukou, odtiahol sa. Vďaka predchádzajúcej skúsenosti s dotykmi a súčasnou vizuálnou informáciou sa robot naučil vyhodnotiť, že príde k neželanému dotyku.
A čo využitie v iných vedách?
Vtelenie je veľkou témou nielen v robotike, kognitívnej vede, ale aj v neurovede. Mnoho vedcov totiž pochopilo, že štúdium mozgu v statických podmienkach kdesi v skeneri nie je dostatočné, pretože to nie sú pre človeka realistické situácie a mozog sa nespráva prirodzene. Čím viac dokážeme roboty naučiť simulovať nás samých, naše metódy spoznávania, tým viac sa to bude dať využiť aj vo vedeckom výskume nás samotných. Navyše, pri robotoch sa dajú rôzne situácie simulovať bez etických problémov, aké so sebou nesú výskumy na ľuďoch či zvieratách.
Vy ste do experimentov zapojili aj vlastnú dcérku.
Robil som s ňou experiment, keď som jej na jednu ruku pripol malý motorček, ktorý jej tam vibroval a sledoval, či sa ho bude vedieť zbaviť. Ako šesťmesačná cítila, že má niečo na ruke, ale nevedela s tým nič urobiť. O pár mesiacov si však motorček vedela dať bez problémov dole. Je teda jasné, že táto schopnosť nie je vrodená, ale získaná. Malé deti si skúmajú vlastné telo a tým nadobudnú takéto schopnosti. My sa snažíme, aby roboty skúmali svoje telo a učili sa podobne ako my.
Vy pracujete s robotom iCub. Humanoidných robotov je však na svete mnoho. Viete povedať, ktorý dokáže najviac?
Pre verejnosť je asi najznámejší robot Asimo od Hondy. Má úctyhodné schopnosti, ale je to skôr ukážka toho, čo dokážu spraviť inžinieri automobilky. Neviem však, či to bude mať nejaké pokračovanie a vývoj. Keď ide o kognitívnu robotiku, teda o roboty, ktoré sa dokážu učiť, iCub je určite v popredí. Ale závisí aj od špecializácie. Veľkou témou dnes sú aj záchranné roboty a tam zase dominuje firma Boston Dynamics. Tá však už nevyrába len dvojnohé humanoidné roboty, ale aj štvornohé roboty, ktoré majú úžasnú silu a schopnosť pohybu v tzv. nepriateľskom prostredí. Skôr pripomínajú zvieratá, pretože sú na takúto prácu stavané lepšie ako človek.
Matěj Hoffmann
(1981)
expert na robotiku
Pochádza z Prahy; vyštudoval Matematicko-fyzikálnu fakultu Univerzity Karlovej.
V rokoch 2006 až 2012 si robil doktorantúru na Univerzite v Zürichu.
V súčasnosti pôsobí v Talianskom inštitúte technológií v Janove, kde sa podieľa na vývoji humanoidného robota iCub.
Jeho zameraním je vtelenie a kognícia u robotov; pracuje na projekte s umelou robotickou kožou.